Biography
I am a PhD student at the University of Bristol and Bristol Robotics Laboratory, under the supervision of Prof. David Barton and Prof. Nathan Lepora. Previously, I worked at Dexmate AI as a research intern. My current research focuses on sim-to-real deep reinforcement learning and multimodal perception for dexterous manipulation. My interests lie in machine learning methods for robot perception and control.
I obtained my MEng degree in Aeronautical Engineering at Imperial College London where I worked on control theory and optimal control.
Interests
- Tactile Sensing
- Dexterous Manipulation
- Sim-to-Real Deep Reinforcement Learning
Education
PhD in Engineering Mathemtics, 2025
University of Bristol
MEng in Aeronautical Engineering, 2019
Imperial College London






Experience
PhD in Engineering Mathematics
Research Intern
Research and Development Engineer
MEng in Aeronautical Engineering
Research and Technology Intern
Projects
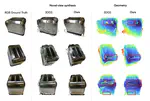
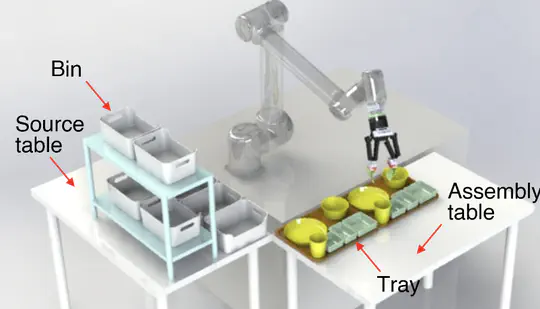
We present a visuo-tactile robotic system for precise food handling for the Robosoft 2023 Manipulation Competition. Our system is able to handle complex shelf configurations, with tasks including bin-picking and drink pouring.
An example repository containing various reinforcement learning algorithms applied to OpenAI gym environemnts.

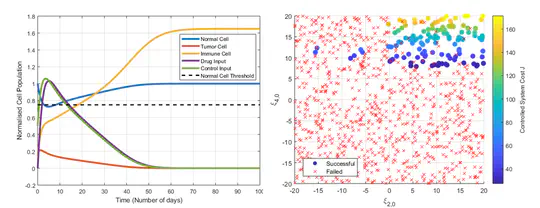
We developed an optimal control algorithm that combines genetic algorithms and lyapunov stability theory to obtain an optimal delivery strategy of chemotherapy during the treatment of cancer.
Contact
- max.yang@bristol.ac.uk
- Bristol, United Kingdom
- Message Me